
A joint research group has enhanced visualization positioning and geographical mapping methods, allowing China’s Zhurong rover to explore and perform scientific studies on Mars more effectively. These advancements were essential for the success of the Tianwen-1 mission, marking China’s initial solo endeavor into interplanetary exploration.
This study was published in the IEEE Journal of Selected Topics in Geospatial and Remote Sensing Applications The researchers are associated with the Aerospace Information Research Institute at the Chinese Academy of Sciences and the Beijing Aerospace Control Center.
The Chinese Tianwen-1 mission, initiated in July 2020, sought to chart Mars' surface, examine geological formations, and investigate the planet’s weather patterns and environmental conditions. An essential part of this endeavor involved deploying the Zhurong rover, which touched down in southern Utopia Planitia on May 22, 2021. For effective navigation across the Martian landscape and for conducting thorough scientific examinations directly from the site, precise location determination and detailed three-dimensional maps were crucial capabilities required by the rover.
In this research, the scientists introduced multiple advancements to upgrade Zhurong’s navigation system. They implemented vignetting correction along with real-time camera mast calibration methods, boosting the image capture quality from the rover's Navigation and Terrain cameras. Thanks to these improvements, they could produce detailed 3D topographical maps accurate down to the centimeter scale. Such precision was vital for analyzing obstacles and mapping out paths for the rover's journey.
In addition, through the integration of cross-site visual localization and digital orthophoto map matching techniques, the scientists improved the rover’s positioning precision to an accuracy level of 0.50% compared to the total traversal distance—a notable enhancement over the 3.11% accuracy achieved by the vehicle's own dead-reckoning system.
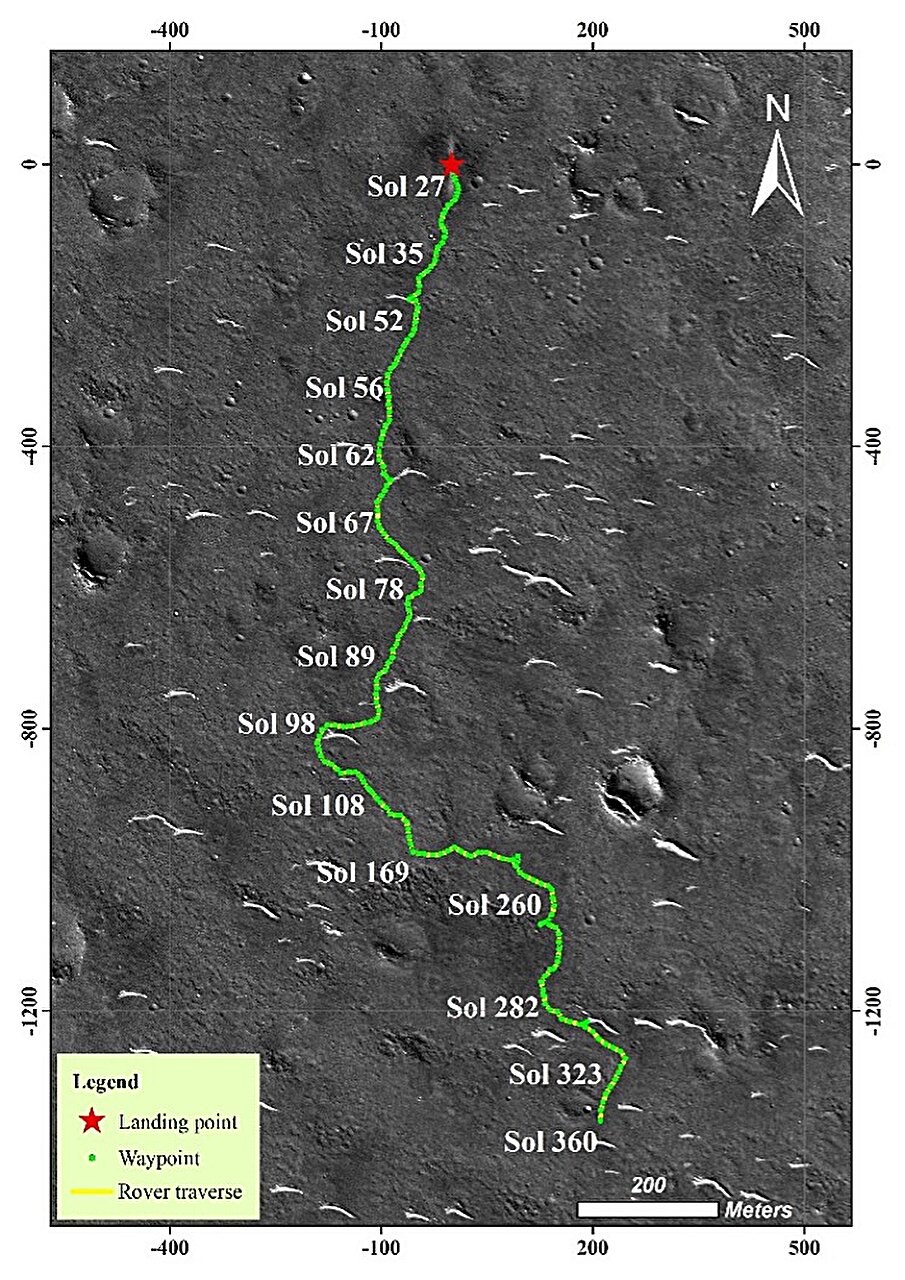
The research showed that the Zhurong rover covered a distance of 2,009 meters, surpassing the odometer’s record of 1,921 meters by 88 meters. This difference resulted from wheels slipping as the vehicle moved downhill, highlighting the critical role of precise positioning data to accurately track the rover's journey across Mars.
Moreover, the high-resolution topographic maps enabled an intricate examination of geological formations like Transverse Aeolian Ridges and impact craters, offering significant understanding into Mars’ geological past and climatic changes.
More information: Wenhui Wan and colleagues, Visual Localization and Topographical Mapping for the Zhurong Rover During the Tianwen-1 Mars Mission, IEEE Journal of Selected Topics in Geoscience and Space Research (2025). DOI: 10.1109/JSTARS.2025.3540377
Provided by the China Academy of Science
The tale was initially released on Massima . Subscribe to our newsletter For the most recent updates on science and technology news.