

Robots designed at insect scale can navigate areas where bigger versions cannot, such as deep within debris from a collapsed structure following an earthquake. Nonetheless, when small crawlers traverse this rubble, they may face high obstructions they're unable to ascend or steep inclines they tend to slip down. Although flying drones could sidestep these risks, the considerable energy needed for sustained flight would significantly curtail how extensively the robot can explore the damaged site before needing to head back and replenish power.
To combine the advantages of two different movement techniques, MIT researchers created a hopping robot capable of clearing high barriers and navigating inclined or rough terrains with significantly lower energy consumption compared to airborne robots. research appears in Science Advances.
The miniature hopping robot, smaller than a person’s thumbnail and lighter than a standard paperclip, features a spring-loaded limb that enables it to jump into the air. Additionally, it utilizes four wing-like components that flap to provide both elevation and directional stability.
The robot is capable of leaping approximately 20 centimeters high, which equates to four times its own height, with a sideways velocity of around 30 centimeters per second. It effortlessly hops over various terrains such as ice, slippery areas, and rough ground, and can also land on a floating drone. Throughout this process, the jumping robot uses roughly 60 percent less energy compared to similar airborne models.
Thanks to its low mass and robustness, along with the energy-efficient jumping mechanism, this robot can transport approximately tenfold the cargo compared to an equivalent small-scale airborne model, paving the way for numerous novel uses.
"The ability to incorporate batteries, circuits, and sensors into a design becomes significantly more practical with a hopping robot compared to a flying one. We aspire for this robot to eventually leave the laboratory setting and prove beneficial in actual world applications," explains Yi-Hsuan (Nemo) Hsiao, an MIT graduate student and co-first author of a research paper focused on the hopping robot.
Maximizing efficiency
Leaping is widespread amongst insects, ranging from fleas that jump onto new hosts to grasshoppers that hop across fields. Although leaping isn’t as prevalent among tiny robotic counterparts, which often either glide through air or creep along surfaces, bouncing offers numerous benefits concerning energy conservation.
Whenever a robot jumps, it converts potential energy, derived from its elevation above the ground, into kinetic energy during descent. As it strikes the surface, this kinetic energy turns back into potential energy before converting once more into kinetic energy as it ascends, repeating the cycle continuously.
To enhance the efficiency of this procedure, the MIT robot incorporates an elastic limb constructed from a compression coil, similar to the mechanism found in a retractable ballpoint pen. When the robot makes contact with the surface below, this coil transforms its downward momentum into upward thrust.
"An ideal spring would allow the robot to bounce continuously without losing energy. However, because our spring isn’t perfect, we utilize the flapping modules to make up for the minor energy loss during each touchdown," Hsiao clarifies.
When the robot springs upward again, the flapping wings generate lift, keeping it steady and properly aligned for the subsequent leap. The device’s four wing-flapping systems draw power from flexible actuators—artificial muscles—that can withstand multiple collisions with the surface without sustaining damage.
Hsiao notes, "Throughout this entire series of experiments, we've consistently used the same robot without needing to halt operations for repairs."
A crucial aspect of the robot’s performance lies in a rapid control system that dictates how the robot should position itself before making another leap. This process relies on an outside motion-capture setup for tracking movements, with an observer algorithm processing these sensory inputs to calculate the required adjustments.
When the robot leaps, it moves along a parabolic path, soaring upwards before descending. At the highest point of this arc, it predicts where it will land. Subsequently, using this anticipated touchdown spot as reference, the control system determines the necessary launch velocity for the following hop. During flight, the robot beats its wings to modify its posture ensuring it hits the surface at an optimal angle and axis, enabling movement in the intended direction and pace.
Durability and flexibility
The scientists tested the jumping robot along with its control system across different types of terrain such as grass, ice, wet glass, and rough earth; it managed to navigate through every type without issue. Additionally, the bot demonstrated the capability to jump effectively even on a surface that was shifting dynamically.
Hsiao mentions that the robot isn’t particularly concerned with the angle of the surface it lands on. Provided it doesn’t slip upon impact with the ground, everything should be satisfactory.
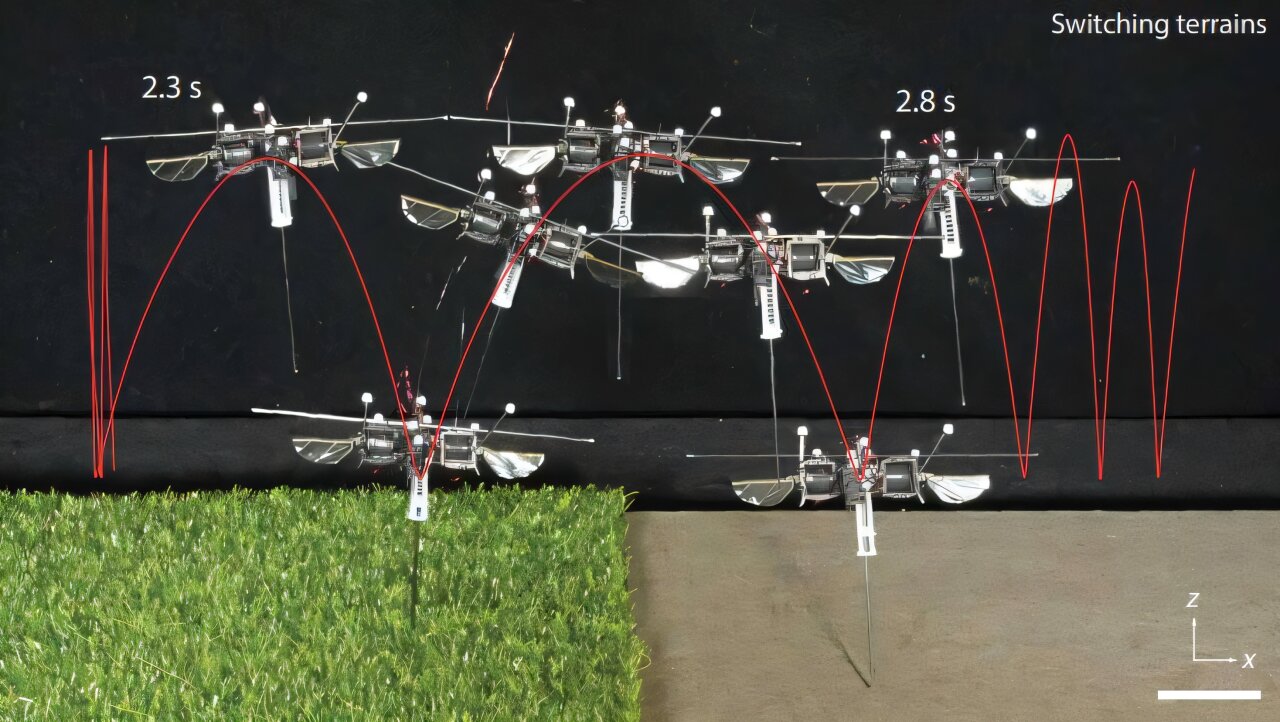
As the controller is capable of managing various terrains, the robot can smoothly switch between different surfaces without skipping a beat.
For example, jumping on grass demands greater propulsion compared to leaping on glass because the blades of grass create a dampening effect that diminishes the hop’s height. To counteract this, the controller can inject additional power into the robot's wings during flight for compensation.
Because of its compact dimensions and low mass, this robot boasts an minimal moment of inertia, making it more nimble compared to a bigger counterpart and superior at enduring impacts.
The researchers highlighted its nimbleness through performances of aerial somersaults. This lightweight bot was additionally capable of leaping onto a flying drone without causing harm to either machine, potentially aiding in cooperative operations.
Furthermore, although the group showcased a hopping bot capable of carrying double its own weight, this limit could potentially go even higher. Increasing the load does not impair the machine’s performance; instead, what primarily restricts the amount the robot can bear is the effectiveness of its spring mechanism.
In the next phase, the researchers intend to utilize its capacity to transport heavy payloads by adding batteries, sensors, and various circuits to the robot. Their aim is to enable autonomous hopping outside the laboratory setting.
More information: Yi-Hsuan Hsiao and colleagues explored hybrid locomotion at the insect size – integrating flight with jumping to boost effectiveness and adaptability. Science Advances (2025). DOI: 10.1126/sciadv.adu4474 . www.science.org/doi/10.1126/sciadv.adu4474
Furnished by Massachusetts Institute of Technology
This tale was initially released on Tech Xplore . Subscribe to our newsletter For the most recent updates on science and technology.